Related Projects: Nitrous Tank (22/23)
Role: Responsible Engineer
Duration: February – May 2023
Requirements: Build, test, and fly a robust mechanism for mechanically actuating a Nitrous Oxide ball valve to feed oxidizer to the injector at engine startup.
Summary: For the 2022-2023 rocketry season, we decided to transition away from the pyro valve (a piston driven by a pyrotechnic charge) and instead use a servo-actuated ball valve. Compared to the pyrotechnic valve, a servo-actuated valve had a smaller flow constriction and required no refurbishment between uses.
The first step was buying a Swagelok 3/4″ ball valve rated to the system MEOP. Then, I machined a motor horn that attached to the ball valve axle.
The motor horn is offset from normal by 45 degrees to prevent binding during opening/closing. However, I then ran into a minor setback. Using a 3D-printed housing mating the servo to the ball valve, the torque from the servo was transferred into the case rather than the linkage.
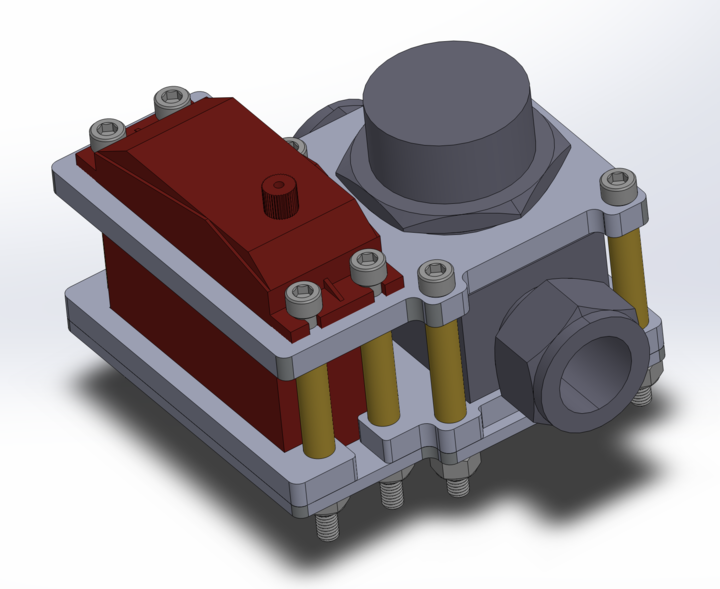
Because of the 90-degree internal corners on the ball valve, machining the existing housing design was impossible with our tools. However, using a waterjet it was possible to create thin aluminum plates with the required geometry. Waterjetted plates were also cheaper and faster to iterate.

I successfully validated that the servo linkage design was viable using the existing housing. Not only did I achieve successful actuation several times, but it was fast. The actuation speed would be improved by an order of magnitude the subsequent year with the Nitrous run valve.


The updated housing allows for easier wrench access to the compression fitting.

A comparison of legacy and updated servo-actuated ball valve designs. There is a noticeable difference both in the mechanism and size of the valve due to increased flow requirements.

The valve was tested in a cold flow and three static fires, then it supported launch in June 2023.